Datasets:

ArXiv:
License:
Update README.md
Browse files
README.md
CHANGED
|
@@ -5,6 +5,8 @@ license: mit
|
|
| 5 |
|
| 6 |
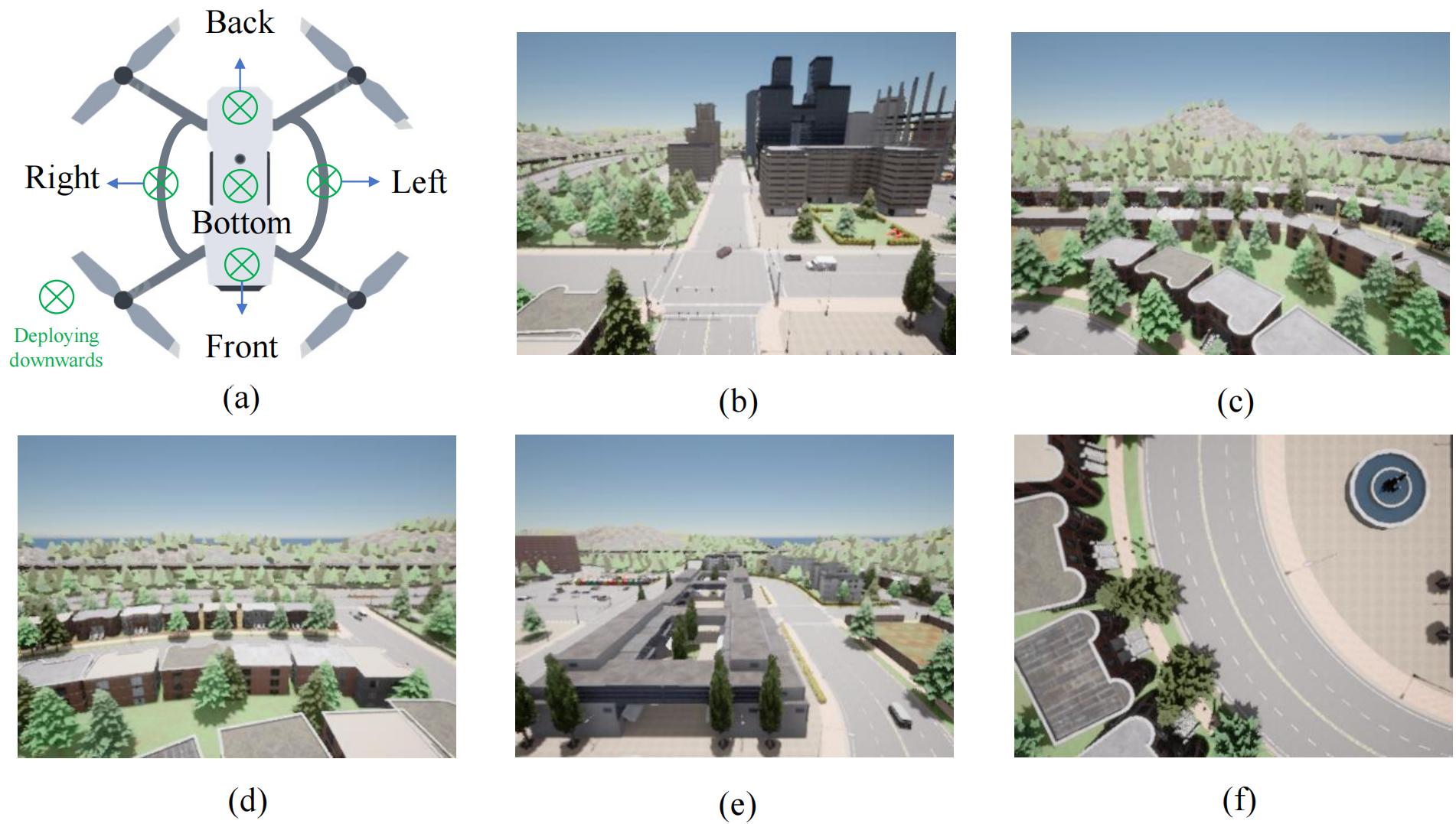
A comprehensive multi-view UAV dataset for visual navigation research in GPS-denied urban environments, collected using the CARLA simulator.
|
| 7 |
|
|
|
|
|
|
|
| 8 |
[](https://opensource.org/licenses/MIT)
|
| 9 |
|
| 10 |
## Dataset Overview
|
|
@@ -24,7 +26,7 @@ This dataset supports research on visual navigation for unmanned aerial vehicles
|
|
| 24 |
## Dataset Structure
|
| 25 |
|
| 26 |
```
|
| 27 |
-
|
| 28 |
├── calibration/
|
| 29 |
│ └── camera_calibration.json # Parameters for all 5 UAV onboard cameras
|
| 30 |
├── depth/ # Depth images from all cameras
|
|
|
|
| 5 |
|
| 6 |
A comprehensive multi-view UAV dataset for visual navigation research in GPS-denied urban environments, collected using the CARLA simulator.
|
| 7 |
|
| 8 |
+
|
| 9 |
+
|
| 10 |
[](https://opensource.org/licenses/MIT)
|
| 11 |
|
| 12 |
## Dataset Overview
|
|
|
|
| 26 |
## Dataset Structure
|
| 27 |
|
| 28 |
```
|
| 29 |
+
Multi-View-UAV-Dataset/town{XX}_YYYYMMDD_HHMMSS/
|
| 30 |
├── calibration/
|
| 31 |
│ └── camera_calibration.json # Parameters for all 5 UAV onboard cameras
|
| 32 |
├── depth/ # Depth images from all cameras
|