

Update README.md
Browse files
README.md
CHANGED
|
@@ -18,7 +18,7 @@ language:
|
|
| 18 |
|
| 19 |
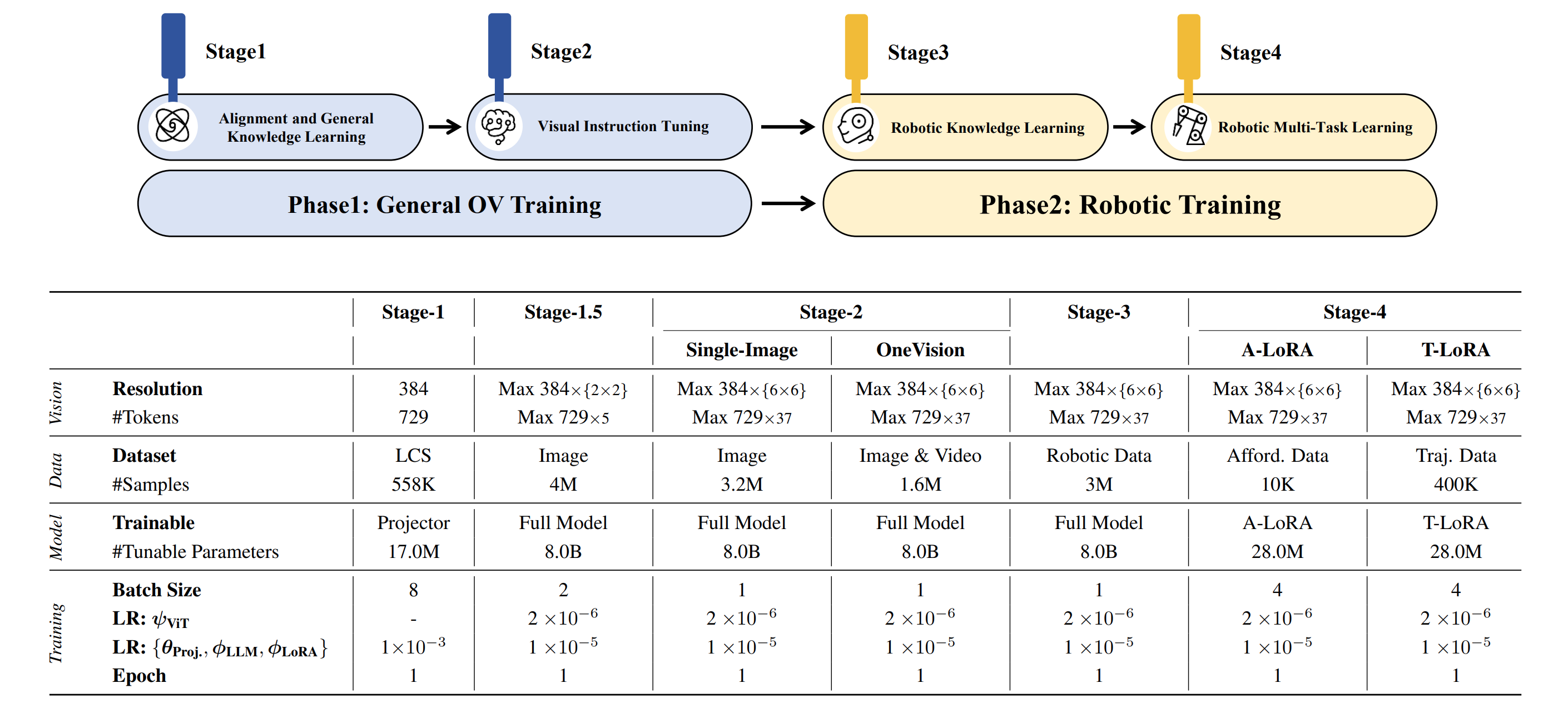
- **[`Base Planning Model`](https://huggingface.co/BAAI/RoboBrain/)**: The model was trained on general datasets in Stages 1–2 and on the Robotic Planning dataset in Stage 3, which is designed for Planning prediction.
|
| 20 |
- **[`A-LoRA for Affordance`](https://huggingface.co/BAAI/RoboBrain-LoRA-Affordance/)**: Based on the Base Planning Model, Stage 4 involves LoRA-based training with our Affordance dataset to predict affordance.
|
| 21 |
-
- **[`T-LoRA for Trajectory`](https://huggingface.co/BAAI/RoboBrain/)**: Based on the Base Planning Model, Stage 4 involves LoRA-based training with our Trajectory dataset to predict trajectory.
|
| 22 |
|
| 23 |
|
| 24 |
|
|
@@ -27,7 +27,7 @@ language:
|
|
| 27 |
|----------------------|----------------------------------------------------------------|------------------------------------------------------------|
|
| 28 |
| Planning Model | [🤗 Planning CKPTs](https://huggingface.co/BAAI/RoboBrain/) | Used for Planning prediction in our paper |
|
| 29 |
| Affordance (A-LoRA) | [🤗 Affordance CKPTs](https://huggingface.co/BAAI/RoboBrain-LoRA-Affordance/) | Used for Affordance prediction in our paper |
|
| 30 |
-
| Trajectory (T-LoRA) | [🤗 Trajectory CKPTs](https://huggingface.co/BAAI/RoboBrain-LoRA-Trajectory/) | Used for Trajectory prediction in our paper
|
| 31 |
|
| 32 |
|
| 33 |
## 🛠️ Setup
|
|
|
|
| 18 |
|
| 19 |
- **[`Base Planning Model`](https://huggingface.co/BAAI/RoboBrain/)**: The model was trained on general datasets in Stages 1–2 and on the Robotic Planning dataset in Stage 3, which is designed for Planning prediction.
|
| 20 |
- **[`A-LoRA for Affordance`](https://huggingface.co/BAAI/RoboBrain-LoRA-Affordance/)**: Based on the Base Planning Model, Stage 4 involves LoRA-based training with our Affordance dataset to predict affordance.
|
| 21 |
+
- **[`T-LoRA for Trajectory`](https://huggingface.co/BAAI/RoboBrain/)**: Based on the Base Planning Model, Stage 4 involves LoRA-based training with our Trajectory dataset to predict trajectory.
|
| 22 |
|
| 23 |

|
| 24 |
|
|
|
|
| 27 |
|----------------------|----------------------------------------------------------------|------------------------------------------------------------|
|
| 28 |
| Planning Model | [🤗 Planning CKPTs](https://huggingface.co/BAAI/RoboBrain/) | Used for Planning prediction in our paper |
|
| 29 |
| Affordance (A-LoRA) | [🤗 Affordance CKPTs](https://huggingface.co/BAAI/RoboBrain-LoRA-Affordance/) | Used for Affordance prediction in our paper |
|
| 30 |
+
| Trajectory (T-LoRA) | [🤗 Trajectory CKPTs](https://huggingface.co/BAAI/RoboBrain-LoRA-Trajectory/) | Used for Trajectory prediction in our paper |
|
| 31 |
|
| 32 |
|
| 33 |
## 🛠️ Setup
|